
APLICAÇÃO DE GÊMEOS DIGITAIS NA ROBÓTICA – ESTUDO DE CASOS
Gian Ricardo Corrêa Silva[1], Lucas Moraes Silva[2], Bruno Correa[3], Heiton Curto Gomes[4], Camila Arian Melo[5]
RESUMO: A modelagem de máquinas, robôs e processos industriais tem demonstrado uma transformação fundamental, conduzindo a modelos gêmeos de malha fechada interconectados, ou seja, o modelo físico de equipamentos, robôs ou do mundo real controlado parametricamente e seus respectivos modelos de sistemas virtuais digitalizados. Esses modelos requerem mapeamento e sincronização de informações complexas com base em modelos do mundo virtual e real. Este artigo apresenta uma revisão de trabalhos científicos publicados nos últimos 2 anos em revistas internacionais especializadas em robótica, computação, automação, gêmeos digitais, sistemas de manufatura, e que estão classificadas com alto fator de impacto nas áreas especificadas. Com base nas contribuições dos trabalhos pesquisados, e nas descobertas apontadas neste trabalho de revisão, destacamos alguns projetos importantes sobre gêmeos digitais em robótica, as estruturas e técnicas para implementação de modelos digitais associados a robôs, que alvejam para a obtenção da competência da chamada Indústria
4.0.
PALAVRAS-CHAVE: gêmeos digitais, robótica, fabricação inteligente, indústria 4.0.
APPLICATION OF DIGITAL TWINS IN ROBOTICS – CASE STUDY
ABSTRACT: The modeling of machines, robots and industrial processes has demonstrated a fundamental transformation, leading to interconnected closed-loop twin models, that is, the physical model of equipment, robots or the real world parametrically controlled and their respective models of digitalized virtual systems. These models require mapping and synchronizing complex information based on virtual and real world models. This article presents a review of scientific papers published in the last 2 years in international journals specialized in robotics, computing, automation, digital twins, manufacturing systems, and which are classified as having a high impact factor in the specified areas. Based on the contributions of the researched works, and on the findings pointed out in this review work, we highlight some important projects on digital twins in robotics, the structures and techniques for implementing digital models associated with robots, which aim to obtain the competence of the so-called Industry 4.0
KEYWORDS: digital twins, robotics, smart manufacturing, industry 4.0.
INTRODUÇÃO
A Indústria 4.0 é definida pela combinação de tecnologias físicas e digitais como processos produtivos mais avançados, robótica, inteligência artificial e IoT, criando uma empresa digital, interconectada, autônoma e capaz de comunicar-se em tempo real, tomando decisões automaticamente se necessário ou até mesmo fornecendo dados suficientes para o balizamento de decisões que serão aplicadas novamente ao nível físico (QUINALHA, 2018).
Os mundos físico e virtual crescem juntos, e a réplica digital de uma entidade física com frequências sob demanda é metaforicamente chamada de gêmeo digital. Os gêmeos digitais são um processo integrado de simulação multidisciplinar, multifísico e multiescala (Tao et al., 2019), compatível com sensores inteligentes populares atuais, plataformas de nuvem, análise de big data, e as tecnologias de inteligência artificial visam explorar plenamente os benefícios trazidos pelos enormes recursos de dados.
![]()
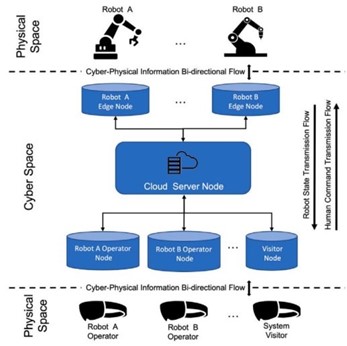
Segundo Wenjun Xu (2021), a robótica industrial em nuvem (ICR) integra a computação em nuvem com robôs industriais (IRs). Os recursos de robôs industriais podem ser encapsulados como serviços em nuvem e usados para fabricação onipresente. Atualmente, os modelos digitais para simulação de processos, simulação de caminhos, etc., são encapsulados como serviços em nuvem. Os modelos digitais na nuvem podem não refletir o estado real dos sistemas de fabricação robóticos físicos, devido à atualização de condição imprecisa ou atrasada e, portanto, resultar em simulação e controle robótico imprecisos. O gêmeo digital pode ser usado para realizar o controle de sensoriamento fino dos sistemas físicos de fabricação por uma combinação de modelo digital de alta fidelidade e dados sensoriais.
Deste modo, os gêmeos digitais integram simulação baseada em modelo, inteligência artificial, aprendizado de máquina e análise de dados para criar contrapartes digitais vivas que se atualizam e mudam à medida que seus gêmeos físicos mudam (FUWEN HU, 2022).
Na era da I4.0, para respostas rápidas a eventos inesperados que não podem ser previstos, os futuros sistemas de manufatura precisarão se tornar altamente autônomos. O mesmo é mais verdadeiro para os principais facilitadores, incluindo visões de máquina e robôs nos cenários industriais. Assim, desenvolveu-se a ideia de “gêmeo digital”, cujo objetivo é não apenas simular em ambiente virtual componentes e sistemas reais, mas integrar estes ambientes através de protocolos de comunicação, de forma que haja convergência e cooperação entre eles.
Fig. 1. Sistema de percepção robótico com base em transportador e guiado por visão.
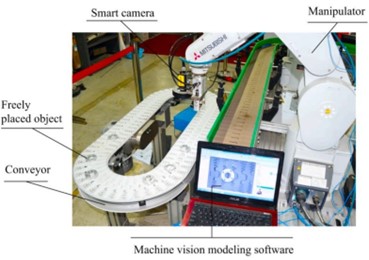
Fonte: Fuwen Hu, (2022).
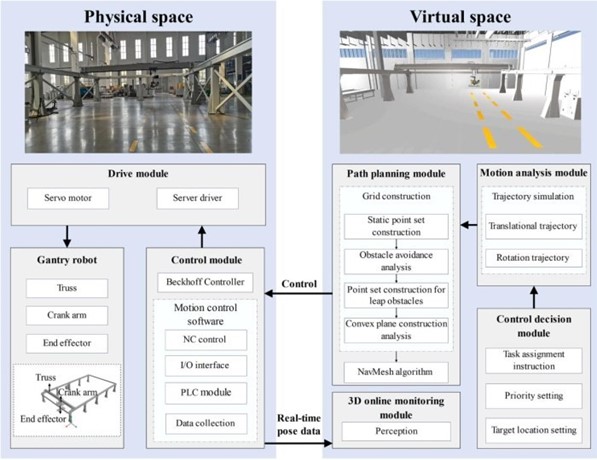
Na figura 2, podemos ver que o gêmeo digital fornece a estrutura metodológica, e a informação mútua intrinsecamente captura e mede as interações dinâmicas entre o ciberespaço e o mundo real, em vez de apenas se referir à sua conexão física e comunicação. Consequentemente, observa-se que a estrutura gêmea digital de detecção visual baseada em transportador, é a que dirige o domínio físico e é o que recebe o feedback do mesmo.
Figura 2. Estrutura gêmea digital de detecção visual baseada em transportador.
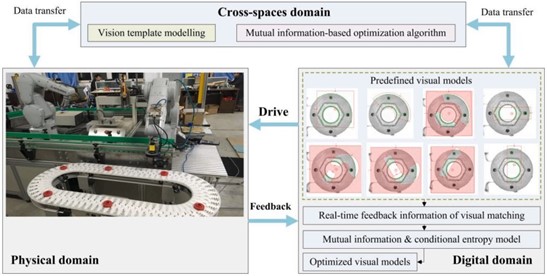
Fonte: Fuwen Hu, (2022).
De acordo com (GE, 2018a), os três elementos que compõem um gêmeo digital são:
- Modelo do Ativo: Descreve detalhadamente sua estrutura e componentes, de forma hierarquizada;
- Análises: Preveem e descrevem seu comportamento, possibilitando a automatização de comportamentos;
- Base de Conhecimentos: Dados acumulados a partir da captação de variáveis relacionadas ao ativo do mundo real, apresentados de forma intuitiva.
Em cada fase, o gêmeo digital provê informações que subsidiam tomadas de decisão que implicam em mudanças no objeto físico, visando sua otimização. Durante a fase de projeto, os gêmeos digitais podem ser utilizados na forma de modelos simplificados para testar virtualmente características físicas do produto, sem se importar com a complexidade total deste item após acabado (GRIEVES, 2014). Eles são capazes de substituir etapas de prototipagem por simulações computacionais, provendo informações para tomada de decisões.
Figura 3. Gêmeos digitais aplicados em uma linha de produção.

Fonte: Grieves (2014).
FUNDAMENTAÇÃO TEÓRICA
Simulação, Gêmeos Digitais e Robôs
PHANDEN (2021) esclarece que, na área aeroespacial, as simulações replicam a história contínua dos voos no tempo, produzindo grande quantidade de dados de simulações, a fim de reconhecer o que a aeronave sofreu e projetar próximos requisitos de manutenção e instruções usando várias técnicas de simulação baseadas em aplicativos, Fluido Computacional Dinâmica (CFD), Engenharia Assistida por Computador (CAE), Métodos de Elementos Finitos (FEM) e simulação de Monte Carlo. Do ponto de vista aeroespacial, o gêmeo digital pode ser definido como uma ferramenta de integração para uma configuração de simulação realista de alto nível com uma plataforma de integridade a bordo do veículo com todos os tipos de dados anteriores (como manutenção e frota), para refletir com precisão toda vida como um gêmeo voador que ajuda a promover a confiança e segurança.
Conforme PHANDEN, na robótica, a simulação se preocupa principalmente com o virtual comissionamento de tarefa para melhorar os algoritmos de controle para robôs em fase de desenvolvimento. Em geral, as abordagens para simulação de robôs são baseadas em dinâmica de corpo cinemático. No entanto, o robô mais útil e conhecido softwares de simulação são:
- GAZEBO e V-REP focados em sensores e sistemas de montagem baseados em imagem;
- ROBOTRAN um software simbólico baseado em física para modelar e analisar sistemas multicorpos;
- ROBCAD da SIMSOL trabalhando em associação com a SIEMENS.
Estas ferramentas de simulação são muito eficazes e adaptáveis para planejar e otimizar sistemas de montagem, robô, fábrica e sensores.
Virtual Testbeds (VT) e DT (eRobotics) direciona para um "DT experimental" que é um desenvolvimento baseado em simulação e operação de um sistema intrincado. A abordagem baseada em “testbed” é muito útil para melhorar os métodos tradicionais de simulação.
GRINSHPUN 2016 entre outros pesquisadores, propuseram ''Ambiente Virtual e Simulação Robótica”. Isto é, um gêmeo digital baseado em VEROSIM para aplicar e otimizar o algoritmo de controle de robôs para comissionamento virtual. Eles apresentaram um fluxo de trabalho para desenvolvimento de algoritmos de controle por meio de um VT.
O trabalho de CHRISTOS VASILEIOU (2021) apresenta a necessidade e estudos consistente da marcha humana, levou a comunidade de pesquisa ao desenvolvimento de modelos mecânicos de robôs andantes e bípedes. Os caminhantes dinâmicos passivos foram introduzidos pela primeira vez por MCGEER em seu trabalho teórico e experimental. A partir daí, muitos pesquisadores investigaram diferentes configurações para robôs bípedes, tanto na abordagem teórica quanto experimental. Estudos teóricos têm focado no efeito de parâmetros de projeto na marcha passiva de robôs bípedes. MCGEER estudou os efeitos da distribuição de massa, raio circular do pé e elementos de amortecimento, enquanto ALEXANDER investigou a complacência axial da perna. Muitos pesquisadores combinaram esses elementos em modelos de complexidade variada e, por meio de simulações, obtiveram resultados úteis com conclusões diretas sobre a marcha robótica ou mesmo bípede humana.
Fig. 4. Esquema do modelo mecânico do bípede durante (a) o SSP- Fase de postura única; e (b) o DSP – Fase de postura dupla.
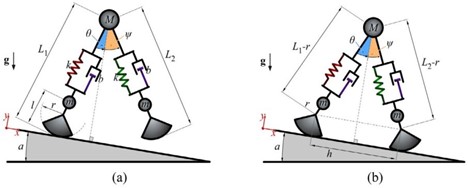
Fonte: Christos Vasileiou (2021).
Fig. 5. O projeto CAD detalhado do bípede.
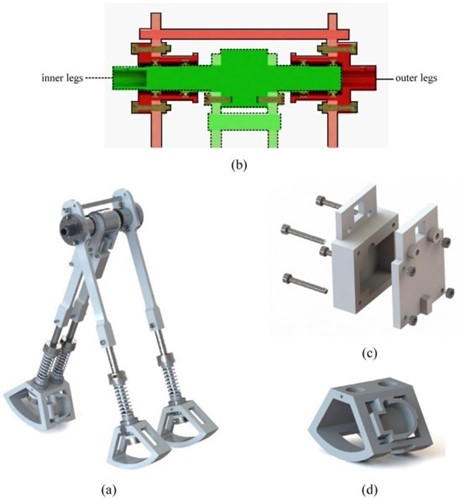
Fonte: Christos Vasileiou (2021).
Fig. 6. (a) Simulação digital de caminhada em modelo bípede duplo, (b) espaço de fase do ângulo da perna.
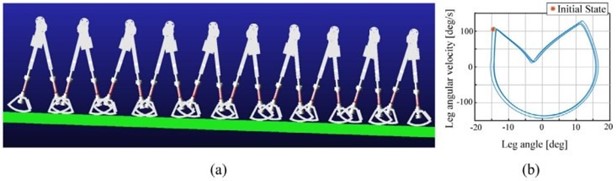
Fonte: Christos Vasileiou (2021).
Fig. 7. (a) Foto do protótipo bípede na rampa, e (b) Topologia do sistema de aquisição de dados.
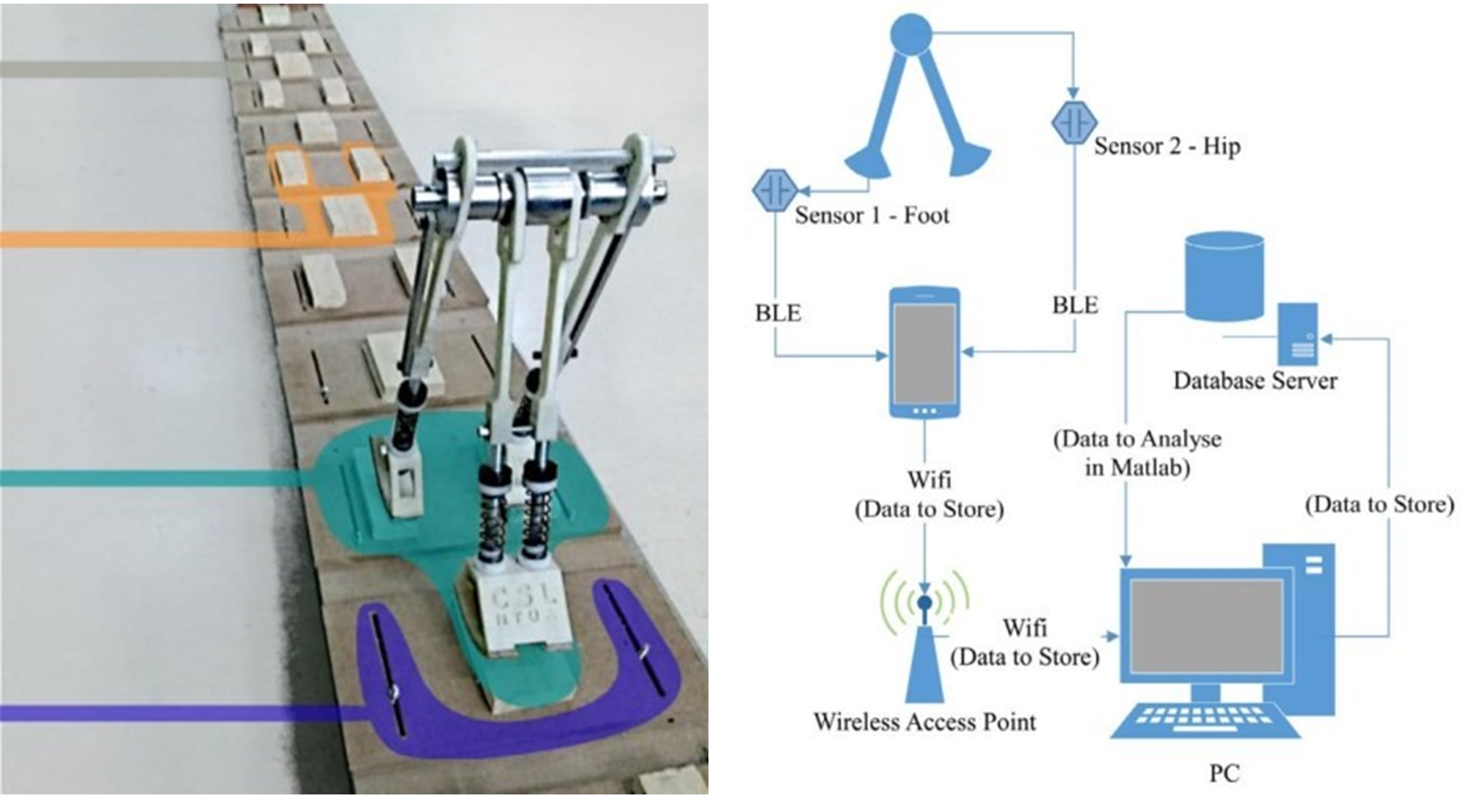
Fonte: Christos Vasileiou (2021).
Os dois sensores (IMUs), são colocados no pé bípede e no quadril, enviam dados amostrados para um aplicativo de smartphone via BLE. O smartphone envia os dados para o PC via WiFi em uma rede local. O computador host envia os dados amostrados em tempo real para um banco de dados SQL, do qual eles podem ser recuperados para análise posterior. Os autores concluem o trabalho e recomendam fortemente a estrutura desenvolvida para o projeto de experimentos semelhantes, e propõem um gêmeo digital cuidadosamente projetado de um bípede passivo para que possa ser usado com confiança para tirar conclusões seguras sobre a resposta dinâmica do robô real.
De acordo com WANG (2022), os robôs de pórtico são um dos robôs industriais mais comuns em fábricas não tripuladas. Eles são amplamente utilizados em linhas de produção para automóveis, medicamentos, móveis e muitos outros campos. Eles podem realizar preensão, alimentação, blanking, rotatividade e transferência de sequência de peças de trabalho automatizadas, permitindo economias significativas nos custos de mão de obra, procedimentos de produção mais consistentes e eficiência de produção aprimorada.
Fig. 8. A estrutura da plataforma gêmea digital proposta para o robô pórtico.
Fonte: Wang (2022).
Fig. 9. Alinhamento de origem e calibração de posição dos espaços digital e físico: (a) Relação de posição da coordenada de origem entre o espaço físico e virtual, (b) A posição e o processo de correspondência coordenada da bancada no espaço real e virtual.
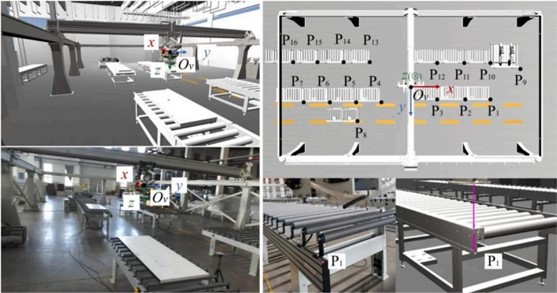
Fonte: Wang (2022).
Os robôs de pórtico desfrutam de aplicações importantes em fábricas não tripuladas e tarefas de fabricação inteligentes. Visando a produção automatizada de móveis de madeira sob medida, este trabalho propõe um gêmeo digital para o planejamento de trajetória tridimensional (3D) de um robô pórtico de braço curvo de grande vão. Primeiro, uma plataforma digital gêmea é construída para mostrar o processo de carregamento e descarregamento do painel da porta do robô pórtico. Em seguida, o problema e o método de planejamento de caminho 3D são propostos com base na plataforma construída. O núcleo do algoritmo consiste em um método de controle bilateral, uma estratégia de construção de malha 3D e planejamento de caminho 3D multiobjectivo usando programação de linha de montagem. O método de controle bilateral é usado para alcançar a percepção e o controle do robô pórtico no espaço físico.
Fig.10. Cenas físicas e virtuais.

Fonte: Wang (2022).
Os pesquisadores concluem que, a verificação e análise dos esquemas apresentados no artigo mostram que o algoritmo de planejamento de trajetória do robô pórtico baseado na plataforma de gêmeo digital tem as seguintes vantagens: Para questões como conversão de coordenadas, detecção de colisão e planejamento de trajetória, o robô pórtico pode alcançar resultados realistas, efeitos intuitivos e imersivos usando a tecnologia de realidade virtual. Engenheiros e usuários podem estudar o processo de movimento do robô na plataforma de gêmeo digital. Esta plataforma também pode ser usada para realizar experimentos de simulação para observar o status e os efeitos do movimento em tempo real, para que os parâmetros possam ser ajustados em tempo. O ambiente de gêmeos digitais fornece uma plataforma de integração multi-algoritmo, na qual a realidade pode não apenas ser prevista e simulada, mas também controlada.
Para a colaboração homem-robô (HRC), um dos métodos mais práticos para garantir a segurança humana com um sistema baseado em visão é estabelecer uma distância mínima segura. Estudos propõem um novo sistema integrado de realidade mista (MR) para HRC com reconhecimento de segurança usando aprendizado profundo e geração de gêmeos digitais.
Em particular, ISO-10218-1 e ISO-10218-2, os padrões para colaborações homem-robô, definem e especificam os requisitos de segurança relacionados a zonas de proteção, espaços de trabalho, colisões, limitação de força de energia e monitoramento de velocidade e força, como reduzir a velocidade ou a força do robô. Entre eles, um dos métodos mais práticos para garantir a segurança humana com um sistema baseado em visão é estabelecer uma distância mínima segura (MSD). Assim, um trabalho de SUNG (2022) se concentra em fornecer informações de segurança em tempo real ao usuário, calculando o MSD entre o usuário e o robô em tempo real.
A pesquisa de CHENGXI LI 2022, propõe um novo sistema de manufatura colaborativa multirobô com controle humano no circuito, aproveitando as técnicas de ponta de realidade aumentada (AR) e gêmeos digitais (DT). No sistema proposto, os DTs de robôs industriais são primeiramente mapeados para robôs físicos e visualizados nos óculos AR. Enquanto isso, um mecanismo de comunicação multirobô é projetado e implementado, para sincronizar o estado dos robôs no gêmeo.
Fig. 11. Um ambiente de trabalho da abordagem proposta para HRI com consciência de segurança.
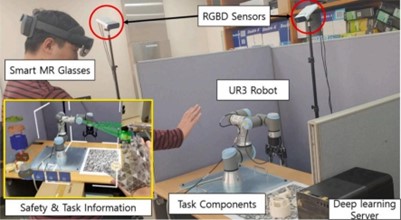
Fonte: Sung (2022).
Fig. 12. Demonstração da abordagem de observação do espaço de trabalho.
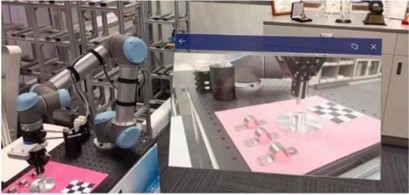
Fonte: Chengxi Li (2022).
Fig. 13. A Arquitetura do Mecanismo de Comunicação Multi-robô e Multi-cliente.
Fonte: Chengxi Li (2022).
Fig. 14. Sistema de manufatura colaborativa multi-robô habilitado para DT assistido por AR.

Fonte: Chengxi Li (2022).
Além disso, um algoritmo de aprendizado de reforço é integrado ao planejamento de movimento do robô para substituir o movimento convencional do robô baseado em cinemática com posições alvo correspondentes. Finalmente, são gerados três modos interativos de DT assistidos por AR, incluindo controle de movimento em tempo real, controle de movimento planejado e modo de monitoramento de robô, que podem ser facilmente alternados por operadores humanos.
Níveis dos Gêmeos Digitais
Nível 1: Gêmeo Descritivo. É uma versão dinâmica e editável dos dados de projeto e construção, é uma réplica visual de um ativo construído. Os usuários determinam o tipo de informação que desejam incluir e o tipo de dados que desejam extrair.
Nível 2: Gêmeo Informativo. Esse nível tem uma camada adicional de dados operacionais e sensoriais. O gêmeo captura e agrega os dados definidos e os verifica para garantir que os sistemas trabalhem juntos.
Nível 3: Gêmeo Preditivo. Esse gêmeo pode usar dados operacionais para obter informações. Como exemplo, imagine um carro que avisa quando está na hora de trocar o óleo.
Nível 4: Gêmeo Abrangente. Esse gêmeo simula cenários futuros e avalia questões hipotéticas.
Nível 5: Gêmeo Autônomo. Esse gêmeo tem a capacidade de aprender e agir em nome dos usuários.
METODOLOGIA DA PESQUISA
Este artigo apresenta uma revisão sistemática, onde se utilizou as plataformas Scopus, Web of Science, Science Direct, como fonte de trabalhos científicos publicados nos últimos 2 anos em revistas internacionais especializadas em robótica, computação, automação, gêmeos digitais, sistemas de manufatura inteligentes, classificadas com alto fator de impacto nas áreas especificadas, e artigos publicados internacionalmente com grande número de citações.
RESULTADOS E DISCUSSÃO
Os resultados principais e discussões mais relevantes da pesquisa de revisão da literatura são apresentados e destacados nos itens anteriores, tais como, na introdução e na fundamentação teórica.
CONCLUSÕES
Este trabalho apresentou uma revisão da literatura atual sobre o uso de gêmeos digitais aplicado em projetos na área da robótica. No futuro, mais funções, como diagnóstico inteligente de falhas, classificação inteligente, percepção visual, serão adicionadas à plataforma de gêmeos digitais. A ideia de um gêmeo digital como um “líder à frente” pode liderar o comportamento otimizado de um sistema físico ou de um robô criando seu modelo virtual preciso dependente do tempo e simulando-o. A cada mudança introduzida nos parâmetros do sistema físico ou na execução do trabalho realizado por um robô, novas variáveis são simuladas para prever o comportamento futuro correspondente e destacar as otimizações necessárias. O comportamento de um robô pode ser visualizado e avaliado virtualmente por gêmeos digitais sem o risco de qualquer perda financeira ou lesão humana que possa estar presente na produção industrial e/ou na sociedade.
REFERÊNCIAS
Alves, R. G., Fazenda Inteligente: Desenvolvimento de um Gêmeo Digital para um Sistema de Irrigação, Centro Universitário FEI, 2021.
Broo, D. G., et al., Design and implementation of a smart infrastructure digital twin, Automation in Construction, vol. 136, pp. 104171, 2022.
Choi, S. H., et al., An integrated mixed reality system for safety-aware human-robot collaboration using deep learning and digital twin generation, Robotics and Computer-Integrated Manufacturing, vol. 73, pp. 102258, 2022.
He, B., et al., Data fusion-based sustainable digital twin system of intelligent detection robotics, Journal of Cleaner Production, vol. 280, pp. 124181, 2021.
Hu, F., Mutual information-enhanced digital twin promotes vision-guided robotic grasping, Advanced Engineering Informatics, vol. 52, pp. 101562, 2022.
Jiang, Y., et. al., Digital twin-enabled smart modular integrated construction system for on-site assembly, Computers in Industry, vol. 136, pp. 103594, 2022.
Kamble, S. S., et al., Digital twin for sustainable manufacturing supply chains: Current trends, future perspectives, and an implementation framework, Technological Forecasting and Social Change, vol. 176, pp. 121448, 2022.
Li, C., et al., AR-assisted digital twin-enabled robot collaborative manufacturing system with human-in-the-loop, Robotics and Computer-Integrated Manufacturing, vol. 76, pp. 102321, 2022.
Malik, A. A., et al., Digital twins for collaborative robots: A case study in human-robot interaction, Robotics and Computer-Integrated Manufacturing, vol. 68, pp. 102092, 2021.
Phanden, R. K., et al., A review on simulation in digital twin for aerospace, manufacturing and robotics, Materials Today Proceedings, vol. 38, pp. 174-178, 2021.
Qibing, Lv, et al., A digital twin-driven human-robot collaborative assembly approach in the wake of COVID-19, Journal of Manufacturing Systems, vol. 60, pp. 837-851, 2021.
Quinalha, E., Gêmeos Digitais, O Futuro da Indústria 4.0: Estudo de Caso, Universidade Tecnológica do Paraná, 2018.
Ren, J., et al., Feature-based modeling for industrial processes in the context of digital twins: A case study of HVOF process, Advanced Engineering Informatics, vol. 51, pp. 101486, 2022.
Rolle, R. P., Arquitetura para Construção de Gêmeos Digitais com foco na Indústria 4.0, Universidade Estadual Paulista, 2019.
Vasileiou, C., el al., Development of a passive biped robot digital twin using analysis, experiments, and a multibody simulation environment, Mechanism and Machine Theory, vol. 163, pp. 104346, 2021.
Xu, W., et al., Digital twin-based industrial cloud robotics: Framework, control approach and implementation, Digital twin-based industrial cloud robotics: Framework, control approach and implementation, vol. 58, pp. 196-209, 2021.
Wenna, W., et al., A digital twin for 3D path planning of large-span curved-arm gantry robot, Robotics and Computer-Integrated Manufacturing, vol. 76, pp. 102330, 2022.